
| Значение параметра | Состояние дискретного входа | Реакция прибора | |
| Канал регулирования 1 | Канал регулирования 2 | ||
| «по» | «no» | - | Нет |
| «Sp1.0» | «Sp2.0» | «1» | Остановка процесса регулирования; реле, определяемые параметрами «rGd» и «rGi», переводятся в состояние «выключено» |
| «0» | Продолжение процесса регулирования | ||
| «Sp1.2» | «Sp2.2» | «1» | Остановка процесса регулирования, реле, определяемые параметром «rGd», переводятся в состояние «включено», реле, определяемые параметром «rGi», - в состояние «выключено» Данное значение может использоваться для остановки процесса ПДД- регулирования с одновременным закрытием клапана |
| «0» | Возобновление процесса регулирования | ||
| «Hnd1» | «Hnd2» | «1» | Переход в ручное управление процессом регулирования (только для двухпозиционного [ПИД] регулирования), после перехода в ручное управление регулятор продолжает выдавать последнее значение управляющего сигнала |
| «0» | Продолжение процесса ПИД-регулирования | ||
| «inc1» | «inc2» | «1» | При длительности менее 2 с: управляющий сигнал (значение параметра «rGS») увеличивается на 0,1 % При длительности более 2 с: управляющий сигнал (значение параметра «rGS») увеличивается на 1% в режиме автоповтора |
| «0» | Нет | ||
| «dEc1» | «dEc2» | «1» | При длительности менее 2 с: управляющий сигнал (значение параметра «rGS») уменьшается на 0,1 % При длительности более 2 с: управляющий сигнал (значение параметра «rGS») уменьшается на 1% в режиме автоповтора |
| «0» | Нет | ||

Линеаризация функции квадратного корня вблизи нуля
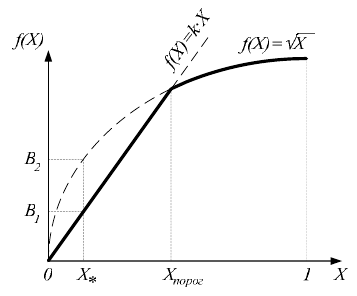
Рисунок Д.1
| Значение параметра «Sil»,% | Приведенное значение входного сигнала в точке максимальной ошибки X* | Максимальная ошибка лианеризации (B2 - B2) |
| 0,5 | 0,00125 | 0,0177 |
| 1,0 | 0,0025 | 0,0250 |
| 2,0 | 0,0050 | 0,0354 |
| 3,0 | 0,0075 | 0,0433 |

![]()

A изм = L(А пред)
где Y=L(X), X∈ R , – кусочно-линейная функция, определяемая nLin (nLin = 2,…,5) парами точек (X1,Y1),…,(X5,Y5):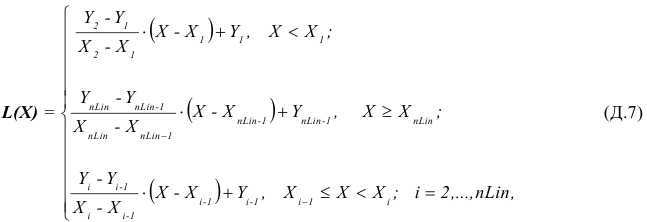
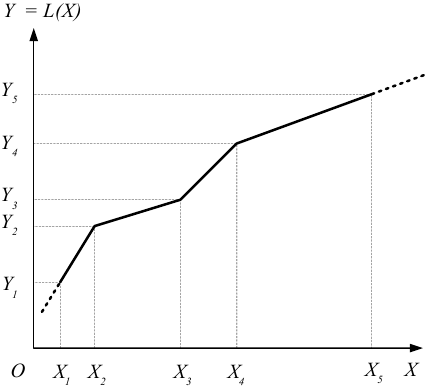
Рисунок Д.2