Программа КИП и А
Принципы регулирования ИРТ 5502
2.5. Принципы регулирования
В данном разделе приведены основные сведения, необходимые для осуществления процессов ПИД-/ПДД-/ручного регулирования объектов с помощью ИРТ. Предполагается, что регулирование осуществляется с помощью исполнительных устройств одного из двух типов:
- нагреватель/холодильник (ПИД-/ручное регулирование);
- клапан/заслонка с регулируемым положением (ПДД-регулирование).
2.5.1. ПИД-регулирование
2.5.1.1. Общие принципы ПИД-регулирования
Алгоритм ПИД-регулирования вырабатывает управляющее воздействие таким образом, чтобы измеренное значение стремилось к заданной уставке процесса регулирования А уст, компенсируя тем самым внешние воздействия на объект регулирования.
В процессе ПИД-регулирования на выходе ИРТ формируется управляющий (выходной) сигнал Y(t), действие которого направлено на уменьшение отклонения E(t) текущего значения А изм измеряемой величины от значения А уст:

где t - текущее значение времени;
E(t) - разность между заданным А уст и текущим А изм значениями измеряемой величины;
Kp - коэффициент пропорциональности, %/ед.изм;
τД – постоянная времени дифференцирования, с;
τИ – постоянная времени интегрирования, с;
KPE(t )– пропорциональная составляющая;
П р и м е ч а н и я
1 Величина А уст задается параметром «rGSt» (см. п.п. 2.6.3, 2.6.4.6).
2 Порядок работы при запуске/остановке процесса ПИД-регулирования описан в п. 2.5.1.6.
Эффективность процесса ПИД-регулирования (быстрый выход на уставку регулятора и устойчивое регулирование при значениях А изм, близких к А уст) зависит от правильности определения для конкретного объекта регулирования значений коэффициентов регулирования Kp, Тд и Ти .
Пользователь может установить эти коэффициенты самостоятельно, вводя значения параметров «rGPr», «rGti», «rGtd» в режиме меню (см. п. 2.6.4.6), или они устанавливаются автоматически в результате запуска пользователем процесса ПИД-регулирования с предварительной автонастройкой (см. п. 2.5.1.6).
2.5.1.2. Прямое и обратное регулирование
При регулировании пользователь выбирает один из методов управления объектом: прямое или обратное.
При прямом управлении значение выходного сигнала Y(t) увеличивается с увеличением значения измеряемой величины (холодильник).
При обратном управлении значение выходного сигнала уменьшается с увеличением значения измеряемой величины (нагреватель).
П р и м е ч а н и е - В ИРТ выбор метода управления определяется значением параметра «rGHC» (см. п. 2.6.4.6).
2.5.1.3. Зона нечувствительности
Для улучшения качества регулирования при небольшом значении рассогласования E(t) в формуле вычисления Y(t) вместо E(t) используется уточненное значение E*(t), определяемое следующим образом:
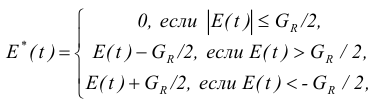
где GR - определяет ширину зоны нечувствительности
При нахождении регулируемой величины в диапазоне E(t) ≤ GR / 2 управляющий сигнал определяется только интегральной составляющей.
П р и м е ч а н и я
1 Величина GR не должна превышать требуемой точности регулирования.
2 Величина GR определяется значением параметра «rHYS» (см. п. 2.6.4.6).
2.5.1.4. Ограничения выходного сигнала
В ИРТ предусмотрена возможность ограничения управляющего сигнала предельными значениями Y min и Y max:
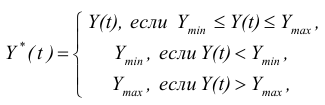
Здесь величины Y min и Y max находятся в пределах 0 ≤ Y min < Y max ≤ 100%
П р и м е ч а н и е - В ИРТ Y min = 0, Y max определяется значением параметра «rPOH» (см. п. 2.6.4.6).
2.5.1.5. Широтно-импульсная модуляция (ШИМ)
ШИМ-модуляция используется в процессах ПИД-/ПДД-/ручного регулирования, а также в процессе автонастройки для формирования управляющих сигналов в соответствии с формулой (2.1) или (2.2). Алгоритм ШИМ-модуляции преобразуют сигнал управления в последовательности импульсов с заданным периодом Т шим, поступающих на один из релейных выходов (определяемым параметром «rGi», см. п. 2.6.4.6). Длительность импульсов τ1, τ2,… пропорциональна значению сигнала управления (см. рисунок 2.7).
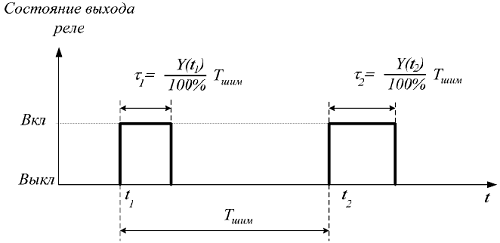
Рисунок 2.7
С целью исключения кратковременных срабатываний исполнительного механизма предусмотрено ограничение минимальной длительности импульса величиной τ min. Для учета импульсов с длительностью, меньшей τ min, применяется нижеописанный алгоритм накопления:
- первый импульс с длительностью меньшей τ min не формируется;
- длительность следующего за ним импульса увеличивается на длительность предыдущего, если суммарная длительность оказывается меньше τ min, то не формируется и этот импульс;
- импульсы не формируются до тех пор, пока их общая длительность не окажется больше τ min.
Использование алгоритма накопления ограничивает минимальную длительность импульсов величиной τ min, сохраняя необходимый средний уровень сигнала управления.
Период ШИМ-последовательности Т шим и минимальная длительность импульса τ min задаются при подготовке ИРТ к работе в соответствии с характеристиками применяемого исполнительного устройства и свойствами объекта регулирования..
П р и м е ч а н и е - Величины Т шим и τ min определяются значениями параметров «rGPd», «rGtL» соответственно (см. п. 2.6.4.6).
2.5.1.6. Порядок работы при запуске/остановке процесса ПИД-регулирования с автонастройкой
В данном пункте рассматривается ПИД-регулирование с помощью исполнительных устройств типа нагреватель (холодильник).
Для осуществления с помощью ИРТ процессов ПИД-регулирования объекта с предварительным автоматическим определением коэффициентов регулирования (автонастройкой), необходимо произвести установку значений всех параметров, относящихся к процессу регулирования (кроме «rGPr», «rGti», «rGtd»), и осуществить соответствующие соединения прибора (с первичным преобразователем, исполнительными устройствами и т.д.). Все установки параметров осуществляются в режиме меню (см. п. 2.6.2 «Навигация по меню»).
Ниже приводится следующий порядок действий для схем, изображенных на рисунках 2.8 и 2.8а.
П р и м е ч а н и е - При определении коэффициентов регулирования с помощью процесса автонастройки рекомендуется, чтобы измеряемая величина объекта регулирования в момент старта автонастройки находилась в стационарном состоянии.
Для запуска процесса ПИД-регулирования с автонастройкой необходимо:
- включить питание прибора;
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- произвести установку требуемых значений всех параметров данного раздела меню (см. п. 2.6.4), кроме коэффициентов регулирования «rGPr», «rGti», «rGtd»;
- установить: «rGtP» = 0, «rGA» = 0, «rGSS» = 0;
ИРТ 5502/М1. Регулирование с помощью нагревателя/холодильника
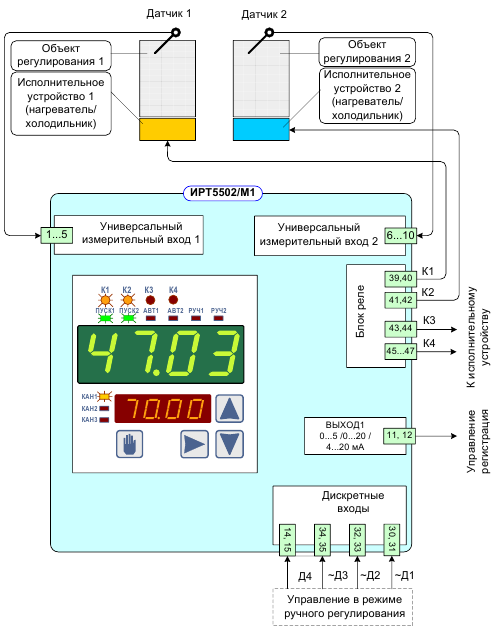
Рисунок 2.8
ИРТ 5502/М2. Регулирование с помощью нагревателя/холодильника
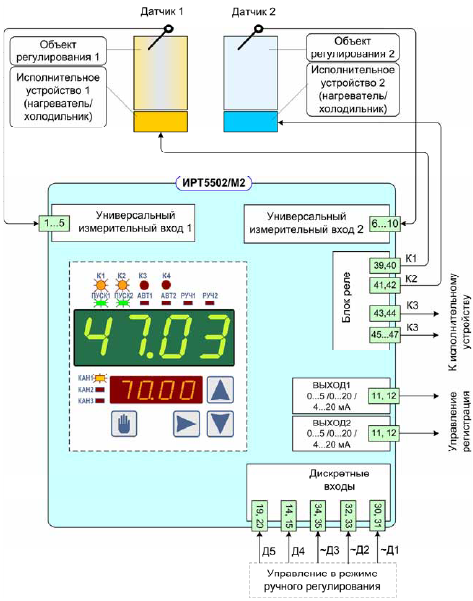
Рисунок 2.8a
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- отключить питание ИРТ;
- подключить первичный преобразователь (датчик 1), предварительно установленный в нужном месте объекта регулирования 1, к универсальному измерительному входу 1 ИРТ (схемы подключения см. в приложении А);
- подключить первичный преобразователь (датчик 2), предварительно установленный в нужном месте объекта регулирования 2, к универсальному измерительному входу 2 ИРТ (схемы подключения см. в приложении А);
- подключить исполнительное устройство 1 к реле 1 (см. рисунки 2.8, 2.8а);
- подключить исполнительное устройство 2 к реле 2 (см. рисунки 2.8, 2.8а);
- при необходимости подключить оставшиеся релейные выходы ИРТ к другим исполнительным устройствам;
- при необходимости подключить выход (выходы) ПВИ ИРТ к устройству регистрации;
- включить питание ИРТ;
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- установить «SrrG» = «InP2» (выбор канала 2 для процесса регулирования 2);
- установить: «rGi» = «– – – 1» для канала 1 (связь реле 1 с выходом регулятора 1);
- установить: «rGi» = «– – 1 –» для канала 2 (связь реле 2 с выходом регулятора 2);
- установить: «rGA» = 1 для каналов 1 и 2 (запуск процесса автонастройки);
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- убедиться, что индикаторы «АВТ1» и «АВТ2» на лицевой панели включены (запущены процессы автонастройки).
При успешном завершении процесса автонастройки для каждого из каналов 1, 2 вычисленные значения коэффициентов регулирования 1 и регулирования 2 устанавливаются автоматически, и ИРТ переходят к выполнению процессов ПИД-регулирования (параметр «rGSS» = 1 для каналов 1, 2), при этом на лицевой панели прибора включаются индикаторы «ПУСК1», «ПУСК2», а индикаторы «АВТ1» и «АВТ2» выключаются.
П р и м е ч а н и е - В случае неудачного завершения процесса автонастройки процесс ПИД-регулирования не запускается, индикатор «АВТ» выключается, значения коэффициентов регулирования «rGPr», «rGti», «rGtd» остаются без изменения. (О возможных причинах неудачного завершения процесса автонастройки см. п. 2.7.2).
Для остановки процесса ПИД-регулирования в каком-либо из каналов, например, в 1-ом, необходимо:
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- установить: «rGSS» = 0 для канала 1;
- убедиться, что индикатор «ПУСК1» на лицевой панели выключен;
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
П р и м е ч а н и е - Остановка (возобновление) процесса ПИД-регулирования в каком- либо из каналов может быть также осуществлена через один из дискретных входов переведением его в состояние «1» («0») (см. Приложение Д.1), при этом значение одного из параметров «FD1» - «FD4» (ИРТ 5502/М1) или «FD1» - «FD5» (ИРТ 5502/М2), соответствующего данному дискретному входу, должно быть предварительно установлено равным «Sp1.0» (см. там же).
2.5.1.7. Порядок работы при запуске/остановке процесса ПИД-регулирования без автонастройки
Для запуска процесса ПИД-регулирования без автонастройки необходимо:
- включить питание ИРТ;
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- произвести установку требуемых значений всех параметров данного раздела меню (см. п. 2.6.4), включая коэффициенты регулирования «rGPr», «rGti», «rGtd»;
- установить: «rGtP» = 0, «rGA» = 0, «rGSS» = 0;
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- отключить питание ИРТ;
- подключить первичный преобразователь (датчик 1), предварительно установленный в нужном месте объекта регулирования 1, к универсальному измерительному входу 1 ИРТ (схемы подключения см. в приложении А);
- подключить первичный преобразователь (датчик 2), предварительно установленный в нужном месте объекта регулирования 2, к универсальному измерительному входу 2 ИРТ (схемы подключения см. в приложении А);
- подключить исполнительное устройство 1 к реле 1 (см. рисунки 2.8, 2.8а);
- подключить исполнительное устройство 2 к реле 2 (см. рисунки 2.8, 2.8а);
- при необходимости подключить оставшиеся релейные выходы ИРТ к другим исполнительным устройствам;
- при необходимости подключить выход (выходы) ПВИ ИРТ к устройству регистрации;
- включить питание ИРТ;
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- установить «SrrG» = «InP2» (выбор канала 2 для процесса регулирования 2);
- установить: «rGi» = «- - - 1» для канала 1 (связь реле 1 с выходом регулятора 1);
- установить: «rGi» = «- - 1 -» для канала 2 (связь реле 2 с выходом регулятора 2);
- установить «rGSS» = 1 для канала 1 (запуск процесса регулирования 1 в канале 1);
- установить «rGSS» = 1 для канала 2 (запуск процесса регулирования 2 в канале 2);
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- убедиться, что индикаторы «ПУСК1» и «ПУСК2» на лицевой панели включены.
Процедура остановки процесса ПИД-регулирования без автонастройки аналогична процедуре остановки процесса ПИД-регулирования с автонастройкой (см. предыдущий пункт настоящего руководства).
2.5.1.8. Порядок работы при переключении между процессами ПИД и ручного регулирования
Для переключения между процессами ПИД и ручного регулирования необходимо предварительно сконфигурировать три дискретных входа таким образом, чтобы один из них, например «~Д1», отвечал за переключение с ПИД-регулирования на ручное и обратно, второй, например «~Д2», отвечал за увеличение управляющего сигнала (мощности), третий, например «~Д3», - за уменьшение.
Для этого необходимо:
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- установить: «FD1»= «Hnd1», «FD2»= «inc1», «FD3»= «dEc1»;
- запустить процесс ПИД-регулирования (см. п.п. 2.5.1.6, 2.5.1.7).
При выполняющемся процессе ПИД-регулирования переход на ручное управление (и обратно) осуществляется переводом дискретного входа «~Д1» в состояние «1» («0») (см. Приложение Д.1).
При ручном управлении на лицевой панели ИРТ включается индикатор «РУЧН1» (или «РУЧН2»). Изменение выходной мощности производится переводом в состояние «1» одного из дискретных входов «~Д2» (увеличение) или «~Д3» (уменьшение). При изменении значения выходной мощности приборы автоматически переходят в режим просмотра значений уставок и выходной мощности, текущее значение мощности отображается на дополнительном индикаторе. При отсутствии изменений величины мощности в течение трех секунд приборы автоматически переходят в режим индикации измерений.
2.5.2. ПДД-регулирование
ПДД - регулирование предназначено для работы с клапанами (трехпозиционное управление).
2.5.2.1. Общие принципы ПДД-регулирования
При ПДД-регулировании обрабатывается сигнал рассогласования E(t) = А изм — A уст.
При запущенном процессе ПДД-регулирования на выходе ИРТ вырабатывается управляющий (выходной) сигнал Z(t), действие которого направлено на уменьшение отклонения E(t) текущего значения А изм измеряемой величины от значения А уст:

см. обозначения к формуле (2.1).
Значения коэффициентов регулирования Kp, τД и τИ для ПДД-регулирования вводятся пользователем установкой соответствующих значений параметров «rGPr», «rGti», «rGtd» в режиме меню (см. п. 2.6.4.6), или определяются автоматически в результате выполнения процесса автонастройки (см. п. 2.5.2.5).
П р и м е ч а н и е - Порядок работы при запуске/остановке процесса ПДД- регулирования приведен в п. 2.5.2.5.
На основе выходного сигнала Z(t) регулятора формируется сигнал управления клапаном (интегрирующим механизмом), представляющий собой величину изменения воздействия на объект регулирования.
2.5.2.2. Зона нечувствительности
Определения зоны нечувствительности для ПДД- и ПИД-регулирования аналогичны (см. п. 2.5.1.3). При нахождении регулируемой величины в диапазоне |E(t)| ≤ GR / 2 управляющий сигнал Z(t) полагается равным 0.
2.5.2.3. Ограничения выходного сигнала
Для исключения излишних срабатываний реле при небольшом значении рассогласования E(t) в ИРТ предусмотрена возможность ограничения управляющего сигнала Z(t) предельными значениями Z min и Z max.
причем -100% ≤ Zmin < Zmax ≤ 100%
П р и м е ч а н и е - В ИРТ Z min = - Zmax, Zmax определяется значением параметра «rPOH» (см. п. 2.6.4.6).
2.5.2.4. ШИМ-модуляция при ПДД-регулировании
ШИМ-модуляция используется для формирования на выходе реле управляющих сигналов в соответствии с формулой (2.2). Алгоритм ШИМ-модуляции преобразует сигнал управления в последовательности импульсов с заданным периодом Т шим. Длительность импульсов τ1, τ2,…. пропорциональна значению сигнала управления в момент начала периода ШИМ (см. рисунок 2.7).
Алгоритмы ШИМ-модуляции при ПДД- и ПИД-регулировании совпадают, если управляющий сигнал является положительным по знаку. ШИМ-последовательность управляющих импульсов формируется в этом случае по одному и тому же закону и поступает на один из релейных выходов ИРТ (см. п. 2.5.1.5), предназначенном для воздействия на объект регулирования в сторону «увеличения» (например, открытие клапана/заслонки).
Отрицательное значение управляющего сигнала при ПИД-регулировании невозможно, а при ПДД-регулировании ШИМ-последовательность импульсов формируется так же, как и в случае положительного по знаку управляющего сигнала, но ШИМ-последовательность импульсов в этом случае поступает на другой из релейных выходов, предназначенном для воздействия на объект регулирования в сторону «уменьшения» (например, закрытие клапана/заслонки).
2.5.2.5. Порядок работы при запуске/остановке процесса ПДД-регулирования с автонастройкой
Для осуществления с помощью ИРТ процесса ПДД-регулирования заданного объекта с автонастройкой необходимо произвести установку значений всех параметров, относящихся к процессу регулирования (см. п. 2.6.4.6), кроме «rGPr», «rGti», «rGtd», и осуществить соответствующие соединения прибора с первичным преобразователем и исполнительными устройствами. Все установки параметров осуществляются в режиме меню (см. п. 2.6.2 «Навигация по меню»).
В качестве примера ниже приводится следующий порядок действий для схем управления клапаном/заслонкой, изображенных на рисунках 2.9, 2.9а.
ИРТ 5502/М1. Трехпозиционное ПДД-регулирование с помощью клапана/заслонки
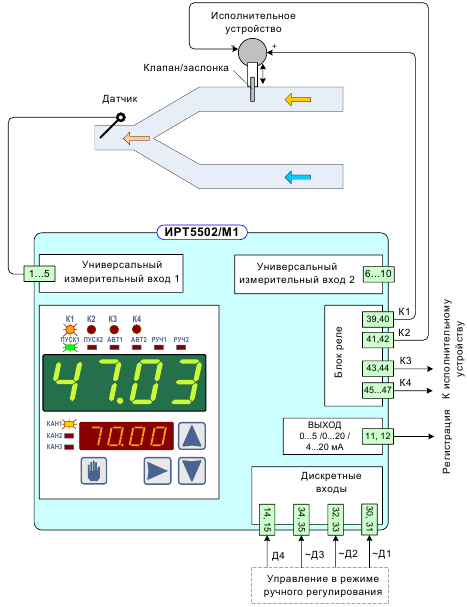
Рисунок 2.9
ИРТ 5502/М2. Трехпозиционное ПДД-регулирование с помощью клапана/заслонки
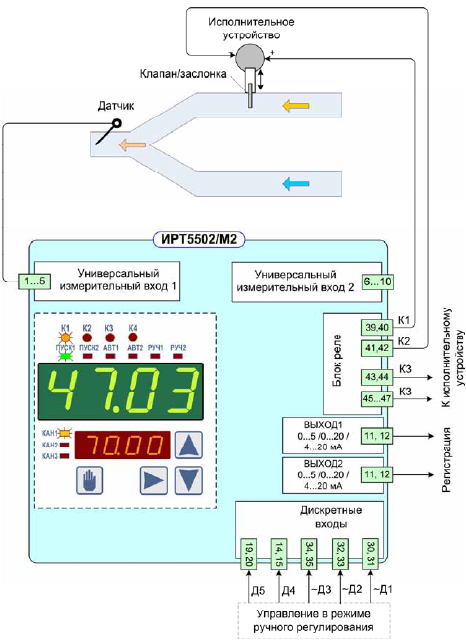
Рисунок 2.9a
Для запуска процесса ПДД-регулирования с автонастройкой необходимо:
- включить питание ИРТ;
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- нажатиями кнопки «✍» добиться включения индикатора «КАН1» (процесс регулирования происходит в 1-ом канале);
- произвести установку требуемых значений всех параметров данного раздела меню (см. п. 2.6.4), кроме коэффициентов регулирования «rGPr», «rGti», «rGtd»;
- установить: «rGtP» = 1, «rGA» = 0, «rGSS» = 0;
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- отключить питание ИРТ;
- подключить первичный преобразователь (датчик 1) к измерительному входу 1 ИРТ (схемы подключения см. в приложении А);
- подключить исполнительное устройство (двигатель, управляющий клапаном/ заслонкой) к релейным выходам «К1» и «К2» (см. рисунок 2.9), причем реле «К1» соответствует увеличению воздействия на объект (открытие клапана), реле «К2» - уменьшению (закрытие клапана);
- включить питание ИРТ;
- убедиться, что включен индикатор «КАН1» (процесс регулирования происходит в 1ом канале);
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- установить: «rGi» = «– – – 1» (связь реле 1 с выходом регулятора [открытие клапана]);
- установить: «rGd» = « – – 1 –» (связь реле 2 с выходом регулятора [закрытие клапана]);
- установить: «rGA» = 1 (запуск процесса автонастройки);
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- убедиться, что индикатор «АВТ1» на лицевой панели включен.
После успешного завершения процесса автонастройки коэффициенты регулирования устанавливаются автоматически, и прибор переходит к выполнению процесса ПДД- регулирования (параметр «rGSS» = 1), при этом на лицевой панели ИРТ включается индикатор «ПУСК1» и выключается индикатор «АВТ1».
П р и м е ч а н и е - В случае неудачного завершения процесса автонастройки процесс ПДД-регулирования не запускается, индикатор «АВТ1» выключен, значения коэффициентов регулирования «rGPr», «rGti», «rGtd» остаются без изменения. Клапан/заслонка остаются в полностью открытом положении.
Для остановки процесса ПДД-регулирования необходимо:
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- убедиться, что включен индикатор «КАН1»;
- установить: «rGSS» = 0;
- убедиться, что индикатор «ПУСК1» на лицевой панели выключен;
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨».
П р и м е ч а н и е - Остановка (возобновление) процесса ПДД-регулирования может быть также осуществлена через один из дискретных входов переведением его в состояние «1» («0») (см. Приложение Д.1), при этом значение одного из параметров «FD1» - «FD4» (ИРТ 5502/М1) или «FD1» - «FD5» (ИРТ 5502/М2), соответствующего данному дискретному входу, должно быть предварительно установлено равным «Sp1.0» или «Sp1.2» (см. там же).
Остановка процесса ПДД-регулирования через дискретный вход не сопровождается автоматическим закрыванием клапана/заслонки, если только остановка не происходит через дискретный вход с установленным значением соответствующего параметра «Sp1.2».
2.5.2.6. Порядок работы при запуске/остановке процесса ПДД-регулирования без автонастройки
Для запуска процесса ПДД-регулирования без автонастройки необходимо:
- включить питание ИРТ;
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- нажатиями кнопки «✍» добиться включения индикатора «КАН1» (процесс регу-лирования происходит в 1-ом канале);
- произвести установку требуемых значений всех параметров данного раздела меню (см. п. 2.6.4), включая коэффициенты регулирования «rGPr», «rGti», «rGtd»;
- установить: «rGtP» = 1, «rGA» = 0, «rGSS» = 0;
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- отключить питание ИРТ;
- подключить первичный преобразователь (датчик 1) к измерительному входу 1 ИРТ (схемы подключения см. в приложении А);
- подключить исполнительное устройство (двигатель, управляющий клапаном/ заслонкой) к релейным выходам «К1» и «К2» (см. рисунок 2.9), причем реле «К1» соответствует увеличению воздействия на объект (открытие клапана), реле «К2» - уменьшению (закрытие клапана);
- включить питание ИРТ;
- убедиться, что включен индикатор «КАН1» (процесс регулирования происходит в 1-ом канале
- войти в режим меню раздел «Конфигурирование», введя пароль 2 (см. п. 2.4.2);
- установить: «rGi» = «– – – 1» (связь реле 1 с выходом регулятора [открытие клапана]);
- установить: «rGd» = «– – 1 –» (связь реле 2 с выходом регулятора [закрытие клапана]);
- установить: «rGSS» = 1;
- выйти из режима меню, нажав одновременно кнопки «∧» и «∨»;
- убедиться, что индикатор «ПУСК1» на лицевой панели включен.
Процедура остановки процесса ПДД-регулирования без автонастройки аналогична процедуре остановки процесса ПДД-регулирования с автонастройкой (см. предыдущий пункт настоящего руководства).