Программа КИП и А
ТРМ10. Приложение И
Ручная настройка ПИД-регулятора
Приведенный ниже метод позволяет определить приблизительные параметры для ручной настройки регулятора. Это бывает необходимо в случае, если проведение предварительной настройки в автоматическом режиме недопустимо.
Параметры регулирования определяются на основе переходной характеристики объекта регулирования. Для снятия переходной характеристики объект выводят в рабочую область в ручном режиме, дожидаются стабилизации регулируемой величины и вносят возмущение изменением управляющего воздействия на ∆Y. Строят график зависимости изменения регулируемой величины от времени (см. рисунок И.1).
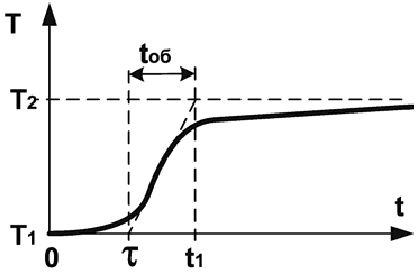
Рисунок И.1
Используя график, вычисляют:
tоб = t1 – τ;
Vob = (T2 – T1) / (tоб ∆Y);
τи = 4 τ;
Xp = 2 τи Vob;
τд = τи [0,1...0,25],
где
Xp – полоса пропорциональности, [ед. изм./%];
τ – постоянная запаздывания, [с]
tоб – постоянная времени объекта, [с];
Vob – максимальная скорость изменения регулируемой величины при изменении задания на один процент, [ед. изм./(с%)];
τи – интегральная постоянная, [с];
T1 – начальное значение, [ед. изм.];
T2 – установившееся значение регулируемой величины, [ед. изм.];
∆Y – изменение управляющего воздействия, [%].
τд – дифференциальная постоянная, [с].
Конкретное значение τд определяется с учетом реальных условий эксплуатации и характеристик используемых технических средств. Для того, чтобы определить оптимальное значение τд, необходимо сопоставить работу системы в реальных условиях эксплуатации при двух-трех различных значениях множителя (например, 0,1; 0,15 и 0,25).