| Обозначение выхода | Тип выходного элемента | Технические параметры |
| Р | Контакты электромагнитного реле | Ток не более 4 А при напряжении не более 250 В (50 Гц) |
| К | Оптопара транзисторная n-p-n-типа | Постоянный ток не более 400 мА при напряжении не более 60 В |
| Т | Выход для управления внешним твердотельным реле | Выходное напряжение 4...6 В, постоянный ток не более 25 мА |
| С | Оптопара симисторная | Ток не более 50 мА при переменном напряжении не более 250 В (50 Гц) |
| С3 | Три оптопары симисторные | Ток не более 50 мА (на каждую оптопару) при переменном напряжении не более 250 В (50 Гц) |
| И | ЦАП «параметр - ток» | Постоянный ток 4...20 мА на внешней нагрузке не более 1 кОм, напряжение питания 12...30 В |
| У | ЦАП «параметр - напряжение» | Постоянное напряжение 0...10 В на внешней нагрузке не менее 2 кОм, напряжение питания 16...30 В |
| Наименование | Значение |
| Напряжение питания переменного тока постоянного тока | 90...264 В (номинальное 220 В), 47...63 Гц 20...375 В (номинальное 24 В) |
| Потребляемая мощность, Вт, не более | 5,5 |
| Максимально допустимый ток встроенного источника питания, мА | 80 |
| Количество каналов | 1 |
| Время опроса входа (секунд, не более): - термометры сопротивления - термоэлектрические преобразователи - унифицированные сигналы постоянного напряжения и тока | 0,8 0,4 0,1 |
| Предел основной приведенной погрешности при измерении: - термоэлектрическими преобразователями, % - термометрами сопротивления и унифицированными сигналами постоянного напряжения и тока, % | ±0,5 ±0,25 |
| Степень защиты корпуса | IP54 |
| Габаритные размеры прибора: | (96х96х47) ± 1 |
| Масса прибора, кг, не более | 0,5 |
| Средний срок службы, лет | 8 |
| Наименование | Диапазон измерений, % | Значение единицы младшего разряда, ед. изм. | Предел основной приведенной погрешности, % |
| Сигнал постоянного напряжения | |||
| -50...+50 мВ | 0...100 | 0,1; 1,0 | ±0,25 |
| Унифицированные сигналы по ГОСТ 26.011-80 | |||
| 0...1 В | 0...100 | 0,1; 1,0 | ±0,25 |
| 0...5 мА | 0...100 | 0,1; 1,0 | |
| 0...20 мА | 0...100 | 0,1; 1,0 | ±0,25 |
| 4...20 мА | 0...100 | 0,1; 1,0 | |
| Примечание - Максимально возможный диапазон индикации от -999 до 9999. При индицируемых значениях выше 999,9 и ниже минус 199,9 цена единицы младшего разряда равна 1. | |||
| Наиме | Диа | Значение единицы младшего разряда, °С2) | Предел основной приве | |
| Термометры сопротивления по ГОСТ Р 8.625-2006 или термопреобразователи сопротивления по ГОСТ 6651-943) 5) | ||||
| Cu 50 (а1) = 0,00426 °С-1) | -50...+200 | 0,1 | ±0,25 | |
| 50М (а = 0,00428 °С-1) | -200...+200 | 0,1; 1,0 | ||
| Pt 50 (а = 0,00385 °С-1) | -200...+850 | 0,1; 1,0 | ||
| 50П (а = 0,00391 °С-1) | -240...+1100 | 0,1; 1,0 | ||
| Cu 100 (а = 0,00426 °С-1) | -50...+200 | 0,1 | ||
| 100М (а = 0,00428 °С-1) | -200...+200 | 0,1; 1,0 | ||
| Pt 100 (а = 0,00385 °С-1) | -200...+850 | 0,1; 1,0 | ||
| 100П (а = 0,00391 °С-1) | -240...+1100 | 0,1; 1,0 | ||
| Ni 100 (а = 0,00617 °С-1) | -60...+180 | 0,1 | ||
| Pt 500 (а = 0,00385 °С-1) | -200...+850 | 0,1; 1,0 | ||
| 500П (а = 0,00391 °С-1) | -250...+1100 | 0,1; 1,0 | ||
| Cu 500 (а = 0,00426 °С-1) | -50...+200 | 0,1 | ||
| 500М (а = 0,00428 °С-1) | -200...+200 | 0,1; 1,0 | ||
| Ni500 (а = 0,00617 °С-1) | -60...+180 | 0,1 | ||
| Cu 1000 (а = 0,00426 °С-1) | -50...+200 | 0,1 | ||
| 1000М (а = 0,00428 °С-1) | -200...+200 | 0,1; 1,0 | ||
| Pt 1000 (а = 0,00385 °С-1) | -200...+850 | 0,1; 1,0 | ||
| 1000П (а = 0,00391 °С-1) | -250...+1100 | 0,1; 1,0 | ||
| Ni 1000 (а=0,00617 °С-1) | -60...+180 | 0,1 | ±0,25 | |
| Термоэлектрические преобразователи по ГОСТ Р 8.585-2001 | ||||
| ТХК (L) | -200...+800 | 0,1; 1,0 | ±0,5 (±0,25)4) | |
| ТЖК (J) | -200...+1200 | |||
| ТНН (N) | -200...+1300 | |||
| ТХА (К) | -200...+1360 | |||
| ТПП (S) | -50...+1750 | |||
| ТПП (R) | -50...+1750 | |||
| ТПР (В) | +200.+1800 | |||
| ТВР (А-1) | 0...+2500 | |||
| ТВР (А-2) | 0...+1800 | |||
| ТВР (А-3) | 0...+1800 | |||
| ТМК (Т) | -250...+400 | |||
| Примечания
1) - Температурный коэффициент термометра сопротивления - отношение разницы сопротивлений датчика, измеренных при температуре 100 и 0 °С, к его сопротивлению, измеренному при 0 °С (R0), деленное на 100 °С и округленное до пятого знака после запятой. 2) - При температуре выше 999,9 и ниже минус 199,9 °С цена единицы младшего разряда равна 1 °С. 3) - Допускается применение нестандартизованного медного термометра сопротивления с R0 = 53 Ом а = 0,00426 °С-1) и диапазоном измерений от минус 50 до +180 °С. 4) - Основная приведенная погрешность без КХС. 5) - Приборы, работающие с термопреобразователями сопротивления с НСХ по ГОСТ 6651 предназначены для использования в странах СНГ |
||||
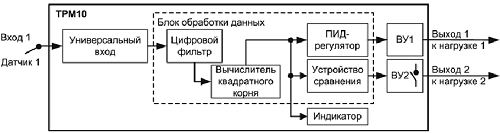
Рисунок 3.1 – Структурная схема прибора
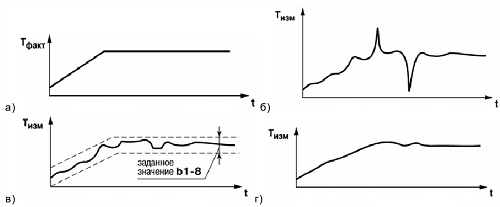
Рисунок 3.2 - Временные диаграммы работы цифрового фильтра: контролируемая температура (а), фильтры отключены (б), включен фильтр b1-8 (в), включены фильтры b1-8 и b1-9 (г)
β = Пфакт / Пизм,
где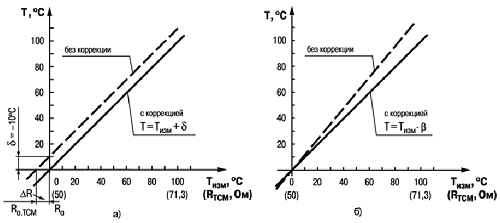
Рисунок 3.3 - Коррекция «сдвиг характеристики» (а) и «наклон характеристики» (б)

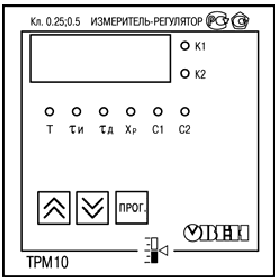
Рисунок 3.4 – Лицевая панель прибора
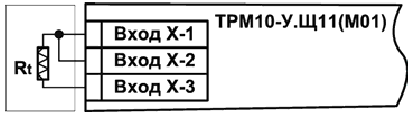
Рисунок 3.5
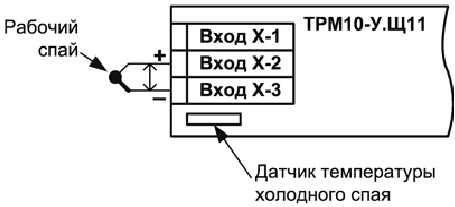
Рисунок 3.6
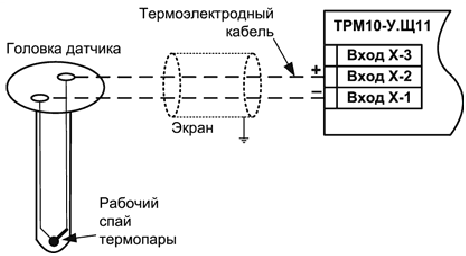
Рисунок 3.7
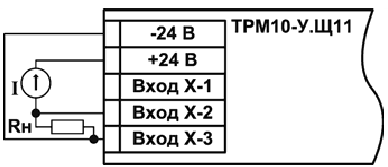
Рисунок 3.8
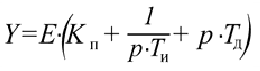
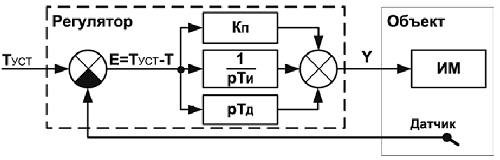
Рисунок 3.9 – Функциональная схема ПИД-регулятора

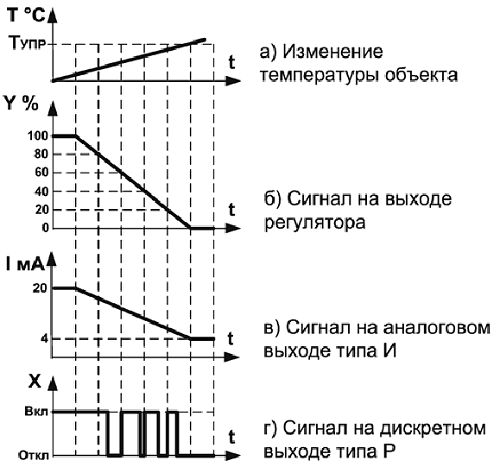
Рисунок 3.10 – Принцип управления в режиме «Нагреватель»
D = Tсл * (Y / 100%)
где: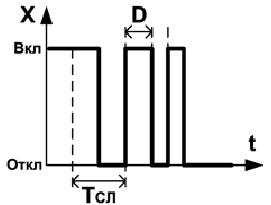
Рисунок 3.11
Рисунок 3.12
Рисунок 3.13
Рисунок 3.14
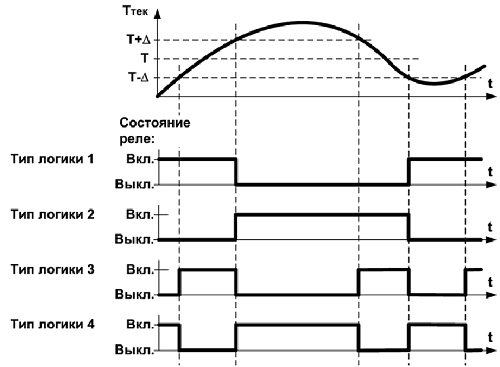
Рисунок 3.15
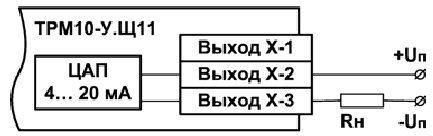
Рисунок 3.16
Rогр = Rн – Rи
Типовые соотношения: Uп = 12 В, Rн = Rи = 100 Ом; Uп = 24 В, Rн = 700 Ом (Rи = 100 Ом, Rогр = 620 Ом).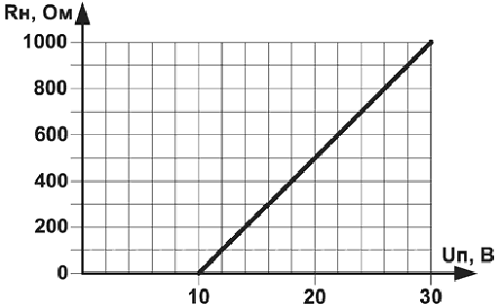
Рисунок 3.17 – График зависимости Rн(Uп)