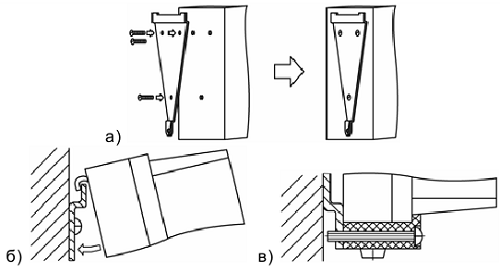
Рисунок 5.1 Монтаж прибора настенного исполнения
Рисунок 5.1 Монтаж прибора настенного исполнения
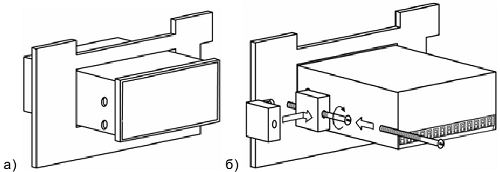
Рисунок 5.2 Монтаж прибора щитового исполнения
| Тип датчика | Длина линии, м (не более) | Сопроти | Исполнение линии |
| Термопрео сопроти | 100 | 15,0 | Трехпроводная, провода равной длины и сечения |
| Термопара | 20 | 100 | Термоэле |
| Унифици | 100 | 100 | Двухпроводная |
| Унифици | 100 | 5,0 | Двухпроводная |
Uп.min < Uп < Uп.max
Uп.min = 10 В + 0,02 А * Rн
Uп.max = Uп.min + 2,5 В
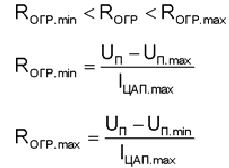
Формулы 5.1
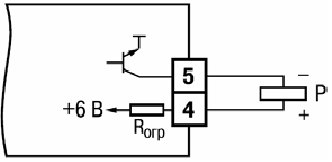
Рисунок 5.9

Рисунок 6.1
PASS 0
В режиме ПРОГРАММИРОВАНИЕ:| Исполнение | Тип ВУ1 | Функция | Тип ВУ2 | Функция |
| ТРМ210-Х.РР | э/м реле | регули | э/м реле | сигнали |
| ТРМ210-Х.РИ | э/м реле | регули | ЦАП от 4 до 20 мА | реги |
| ТРМ210-Х.КР | транз. оптопара | регули | э/м реле | сигнали |
| ТРМ210-Х.КИ | транз. оптопара | регули | ЦАП | реги |
| ТРМ210-Х.СР | симист. оптопара | регули | э/м реле | сигнали |
| ТРМ210-Х.СИ | симист. оптопара | регули | ЦАП | реги |
| ТРМ210-Х.ИР | ЦАП от 4 до 20 мА | регули | э/м реле | сигнали |
| ТРМ210-Х.ИИ | ЦАП от 4 до 20 мА | регули | ЦАП | реги |
| ТРМ210-Х.СС | симист. оптопара | регули | симист. оптопара | сигнали |
| ТРМ210-Х.КК | транз. оптопара | регули | транз. оптопара | сигнали |
| ТРМ210-Х.ТР | выход для управления твердотельным реле | регули | э/м реле | сигнали |
| ТРМ210-Х.УР | ЦАП от 0 до 10 В | регули | э/м реле | сигнали |
| ТРМ210-Х.СЗ | 3 симист. оптопары | регули | — | — |
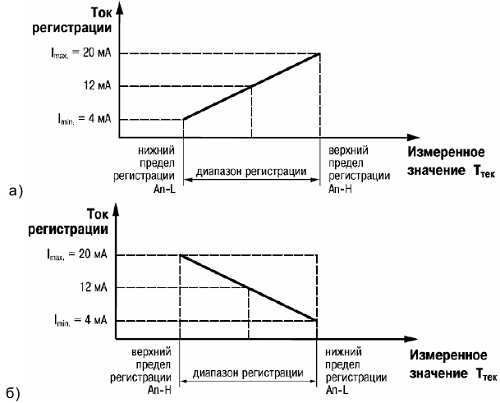
Рисунок 6.2
| Параметр | Имя | Протокол | ||
| ОВЕН | ModBus RTU | ModBus ASCII | ||
| Количество стоп-бит | Sbit | 1 | 2 | 2 |
| Длина слова данных | LEn | 8 бит | 8 бит | 7 бит |
| Контроль четности | PrtY | нет | нет | нет |
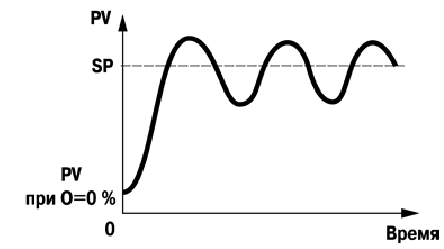
Рисунок 7.1
| Функция (hex) | Действие | Примечание |
| 03 | Получение текущего значения одного или нескольких регистров | |
| 10 | Запись значений в несколько регистров | Устанавливается ограничение на запись только одного регистра |
| 08 | Диагностика. Получение данных о состоянии линии связи. | Поддерживается только код 00 - Вернуть запрос, который используется для проверки соединения между Master и Slave |
| Параметр Имя ОВЕН | Назначение | Адрес Modbus (hex) | Тип данных |
| STAT | Регистр статуса | 0x0000 | binary |
| 0x 1008 | binary | ||
| PV | Измеренная величина | 0x0001 | Signed Int16 |
| 0x1009; 0x100A | Float32 | ||
| SP | Уставка регулятора | 0x0002 | Signed Int16 |
| 0x100B; 0x100C | Float32 |