Программа КИП и А
ТРМ212. Приложение Ж
Методика ручной настройки ПИД-регулятора
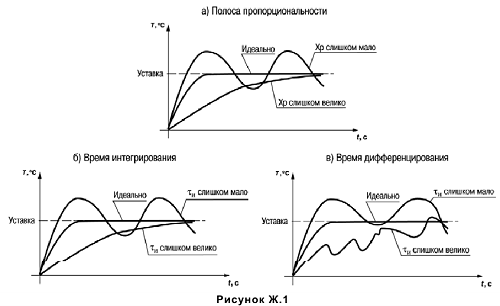
В отдельных случаях может потребоваться ручная подстройка вычисленных в режиме АВТОНАСТРОЙКА параметров регулятора. Определить оптимальные параметры можно с помощью графика изменения регулируемой величины при выходе на уставку (рисунок Ж.1).
Коррекция характеристики регулируемой величины осуществляется изменением значений:
а – полосы пропорциональности (Хp);
б – постоянной времени интегрирования (τи);
в – постоянной времени дифференцирования (τд).
Для определения оптимальных параметров регулятора необходимо выполнить следующие действия:
1. Включить прибор с запущенным ПИД-регулятором (r-S = rUn).
2. Отключить режим быстрого выхода на уставку (rAnP = oFF).
3. Построить зависимость регулируемой величины от времени.
4. Если полученная характеристика отличается от идеальной, то необходимо произвести корректировку коэффициентов ПИД-регулятора Хр, τи, τд:
– Произвести коррекцию регулируемой величины на выходе, уменьшая или увеличивая Хp (рисунок Ж.1,а).
– Если, изменяя значение Хр, не удается получить идеальную характеристику зависимости регулируемой величины от времени, то следует изменить параметр τи(рисунок Ж. 1,б).
– Если и в этом случае выходная экспериментальная характеристика регулируемой величины не идеальна (рисунок Ж.1,в), изменить параметр τд.