| Наименование | Значение |
| Напряжение питания, В | 90...245 |
| Потребляемая мощность, ВА | 6 |
| Частота, Гц | 47...63 |
| Тип датчика или входной сигнал | Диапазон измерений | Значение единицы младшего разряда1) |
| 1 | 2 | 3 |
| Термопары (по ГОСТ Р 8.585-2001) | ||
| ТХК (L) | от -200 до 800 °С | 0,1 °С |
| ТХА (К) | от-200 до 1300 °С | |
| ТНН (N) | от-200 до 1300 °С | |
| ТЖК (J) | от-200 до 1200 °С | |
| ТМК (Т) | от -200 до 400 °С | |
| ТВР (А-1) | от 0 до 2500 °С | |
| ТВР (А-2) | от 0 до 1800 °С | |
| ТВР (А-3) | от 0 до 1800 °С | |
| ТПП (R) | от 0 до 1750 °С | |
| ТПП (S) | от 0 до 1750 °С | |
| ТПР (В) | от 200 до 1800 °С | |
| Термопреобразователи сопротивления (по ГОСТ 6651-94)2) | ||
| 50M (Cu 50 ) W100 = 1,4260 | от -50 до 200 °С | 0,1 °С |
| 50М (Cu 50) W100 = 1,4280 | от -190 до 200 °С | |
| 50П (Pt 50) W100 = 1,3850 | от-200 до 750 °С | |
| 50П (Pt 50) W100 = 1,3910 | от -200 до 750 °С | |
| 100M (Cu 100) W100 = 1,4260 | от -50 до 200 °С | |
| 100М (Cu 100) W100 = 1,4280 | от -190 до 200 °С | |
| 100П (Pt 100) W100 = 1,3850 | от -200 до 750 °С | |
| 100П (Pt 100) W100 = 1,3910 | от -200 до 750 °С | |
| Нестандартизированные термопреобразователи сопротивления3) | ||
| ТСП с R0 = 46 и W100 = 1,3910 | от -200 до 750 °С | 0,1 °С |
| TCM с R0 = 53 и W100 = 1,4260 | от -50 до 200 °С | |
| Унифицированные сигналы постоянного тока | ||
| от 4 до 20 мА | от 0 до 100 % | 0,1% |
| от 0 до 20 мА | от 0 до 100 % | |
| от 0 до 5 мА | от 0 до 100 % | |
| Унифицированные сигналы постоянного напряжения | ||
| от 0 до 1 В | от 0 до 100 % | 0,1% |
| от -50 до 50 мВ | от 0 до 100 % | |
|
1) - При температурах выше 1000°С и в точке минус 200°С значение единицы младшего разряда равно 1°С.
2) - W100 – отношение сопротивления датчика при 100 °С к его сопротивлению при 0 °С (R0). 3) - НСХ датчиков ТСП(46П) и ТСМ(53М), ранее известных как гр. 21 и гр. 23, соответственно, приведены в методике поверки. Примечание. Разрешающая способность прибора определяется значением единицы младшего разряда. |
||
| Наименование | Корпус | ||
| щитовой Щ1 | щитовой Щ2 | настенный Н | |
| Габаритные размеры, мм (без элементов крепления) | 96х96х70 | 96х48х100 | 130х105х65 |
| Степень защиты корпуса | IP541) | IP541) | IP44 |
| Наименование | Значение |
| Основной вход | |
| Время опроса входа, не более | 1 с |
| Входное сопротивление прибора при подключении источника унифицированного сигнала: | |
| - тока (с подключенным внешним прецизионным резистором, см. п. 5.3.3.3.1) | 100 Ом ± 0,1 % |
| - напряжения,не менее | 100 кОм |
| Предел основной допускаемой приведенной погрешности прибора при измерении: | |
| - термопреобразователем сопротивления | 0,25 % |
| - термопарой | 0,5 % |
| - унифицированных сигналов тока и напряжения | 0,5 % |
| Дополнительный вход | |
| Сопротивление ключей в состоянии: | |
| - «замкнуто» | от 0 до 1 кОм |
| - «разомкнуто» | более 100 кОм |
| Тип ВУ | Ток нагрузки, не более | Напряжение |
| Транзисторная оптопара | 200 мА | 40 В постоянного тока |
| Симисторная оптопара1) | 0,5 А2) | 240 В |
| Электромагнитное реле:3) | ||
| ПИД-регулирование двухпозиционное регулирование | 1 А 8 А | 220 В перем. тока, частотой 50...60 Гц, cos φ > 0,4 30 В пост. тока аналогично |
| Выход для управления внешним твердотельным реле | 100 мА | 4…6В |
|
1) Характеристики приведены для оптопары, управляющей мощными тиристорами
2) При работе симисторной оптопары в непрерывном режиме ток нагрузки не может превышать 50 мА 3) Электрическая прочность реле при максимальной нагрузке 106 переключений |
||
| Наименование | Значение |
| Тип интерфейса | RS-485 |
| Тип протокола | ОВЕН, ModBus-RTU (Slave), ModBus-ASCII (Slave) |
| Скорость передачи данных, кбит/с | 2,4; 4,8; 9,6; 14,4; 19,6; 28,8; 38,4; 57,6; 115,2 |
| Тип кабеля | Экранированная витая пара |
| Наименование | Тип ВУ: ЦАП «параметр - напряжение» | Тип ВУ: ЦАП «параметр - ток» |
| Диапазон выходного сигнала | от 0 до 10 В | от 4 до 20 мА |
| Дискретность ЦАП | 10 разрядов | 10 разрядов |
| Сопротивление нагрузки | более 2 кОм | от 0 до 1000 Ом |
| Диапазон напряжения постоянного питания | от 15 до 32 В | от 15 до 32 В |
| Предел допустимой основной приведенной погрешности измерительного преобразователя (ЦАП) | 0,5 % | 0,5 % |
Рисунок 3.1
PASS 0
В режиме ПРОГРАММИРОВАНИЕ: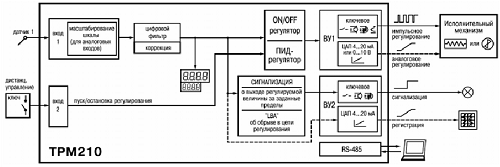
Рисунок 3.2 – Структурная схема ТРМ 210
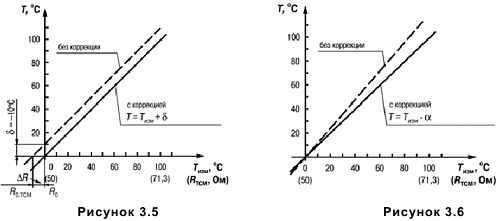


Формула 3.1
Рисунок 3.8
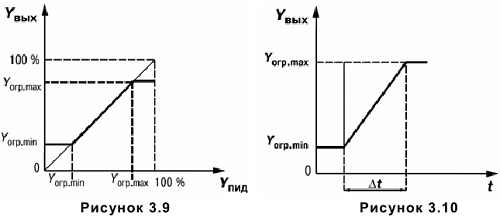
Рисунок 3.11
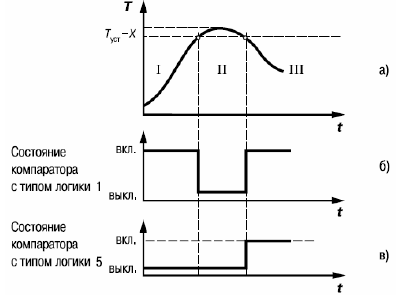
Рисунок 3.12
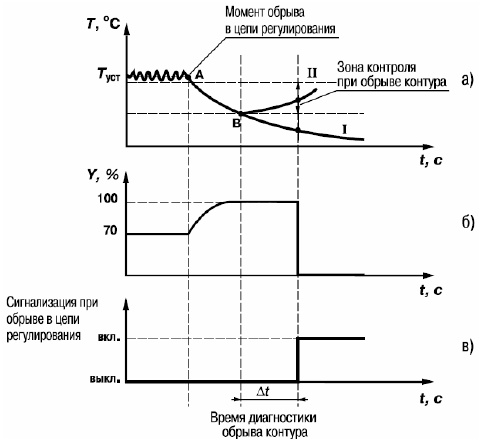
Рисунок 3.13
Рисунок 3.14